VisSim
Description: VisSim is a visual block diagram language used for simulating dynamic systems and modeling physical processes. It enables fast creation and iteration of models using a drag-and-drop interface.
Type: software
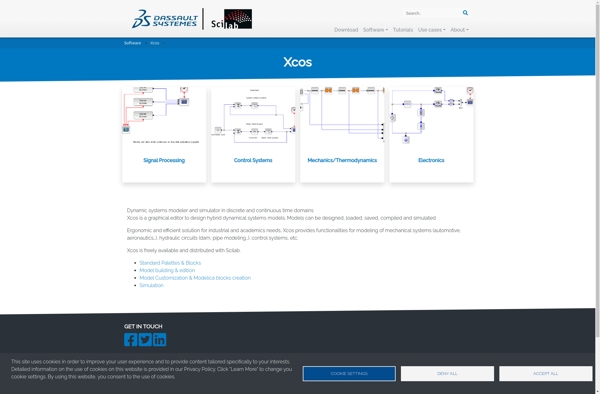
Xcos
Description: Xcos is an open-source graphical programming tool for modeling and simulating dynamical systems, specifically designed for control systems modeling. It features block diagram modeling, simulation, data plotting, and embedded code generation.
Type: software
Pricing: Open Source