RAASPI/BUSS is an open-source robotics software platform used for building custom robotics projects. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more.
RAASPI/BUSS is an open-source robotics software platform used for building custom robotics projects. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more.
What is RAASPI/BUSS?
RAASPI/BUSS is an open-source robotics middleware framework for creating complex and robust robot software architectures. It provides a structured communications layer on top of the host operating system, along with hardware abstraction, device drivers, libraries, visualizers, and more.
Some key capabilities and features of RAASPI/BUSS include:
Hardware abstraction for sensors, actuators, and other devices
Structured inter-process communication using a publish/subscribe model
Asynchronous message passing between processes
Graphical telemetry and visualization tools for debugging
Modular architecture for organizing complex robotics systems
Packages and tools for computer vision, navigation, manipulation, and more
Simulation environments with physics, sensors, and virtual robots
Large community supported ecosystem for development and distribution
RAASPI/BUSS aims to provide productivity boosts for robotics developers, researchers, and hobbyists by handling low-level messaging and hardware control so they can focus on high-level robot behavior and intelligence.
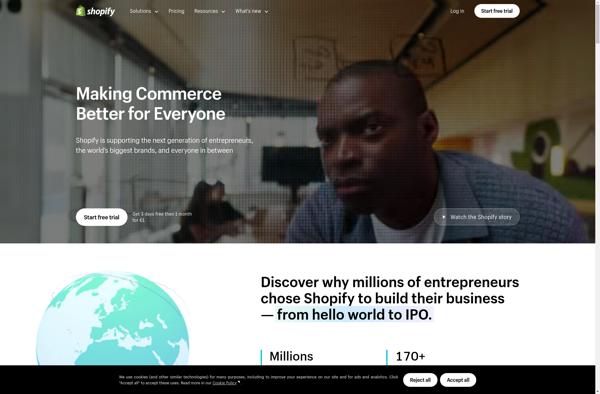
Shopify is a leading cloud-based, multi-channel commerce platform designed for small and medium-sized businesses. It allows entrepreneurs to set up and manage online stores across multiple sales channels, including web, mobile, social media, marketplaces, brick-and-mortar locations, and pop-up shops.Some key features of Shopify include:Beautiful themes and easy customization to showcase...
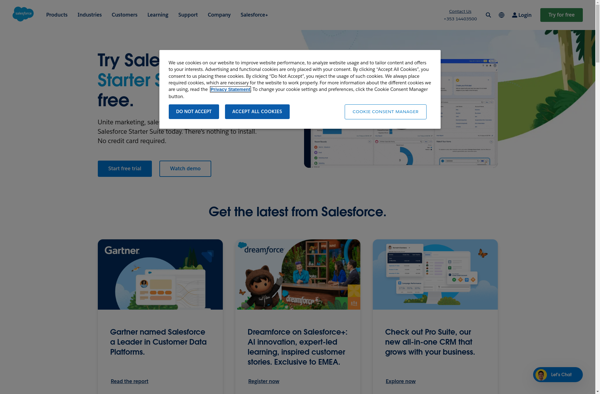
Salesforce is a cloud-based customer relationship management (CRM) platform that helps businesses connect with customers, partners, and employees. It was founded in 1999 and has become the world's #1 CRM platform with over 150,000 companies using it.Key features of Salesforce include:Contact Management - Organize contact details for people and companies...
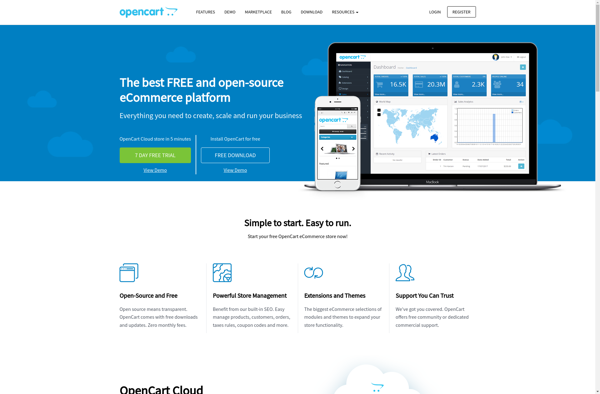
OpenCart is a free, open source ecommerce platform for building online stores. Originally released in 2014, OpenCart has become a popular choice among small businesses and startups looking to sell products online without investing in expensive proprietary software.Some key features of OpenCart include:User-friendly admin interface to manage store, products, orders...
WooCommerce is a flexible, open-source eCommerce platform built on WordPress. Since its launch in 2011, it has become the most popular eCommerce solution for WordPress sites.With WooCommerce, users can set up a professional online store directly within an existing WordPress site. It is designed to integrate seamlessly with WordPress themes...
Beekavach is an open-source antivirus solution designed specifically for Linux systems. It aims to provide enterprise-grade protection for Linux desktops, servers, and IoT devices against modern malware threats.Beekavach utilizes advanced heuristic scanning engines to identify malicious behaviors and block threats in real-time. It has kernel-level integration for detecting rootkits and...
Zen Cart is a popular open source ecommerce platform used by over 300,000 online stores. It provides a complete solution for merchants to set up an online store, manage products, take payments, track orders, and more.Some key features of Zen Cart include:Product management - Add product descriptions, images, pricing, inventory...
Zoho CRM is a feature-rich customer relationship management (CRM) platform designed for businesses of all sizes. It helps streamline sales, marketing, customer support, and overall customer engagement processes in one easy-to-use system.Key features of Zoho CRM include:Contact management - Organize all your customer and prospect contact details and interactions in...
SugarCRM is an open-source customer relationship management (CRM) platform designed for sales, marketing, and support teams to organize, track, and communicate with customers and sales leads. First launched in 2004 by SugarCRM Inc, SugarCRM aims to provide an affordable and flexible alternative to proprietary CRM suites.Some key features of SugarCRM...
Adobe Commerce is a flexible, scalable open-source ecommerce platform powered by Magento. It gives merchants complete control over the content, look, and functionality of their online stores without the need for developers or IT resources.Key features of Adobe Commerce include:Responsive themes and storefront optimization for mobile and desktopPowerful marketing tools...
Drupal Commerce is a flexible e-commerce platform built on Drupal, an open-source content management system. It provides a suite of tools for building online stores, taking payments, calculating taxes, managing shipping, and more.As an add-on Drupal module, Drupal Commerce integrates tightly with existing Drupal websites. This allows online merchants to...