Gazebo Robot Simulator
Gazebo Robot Simulator: Open Source 3D Simulator
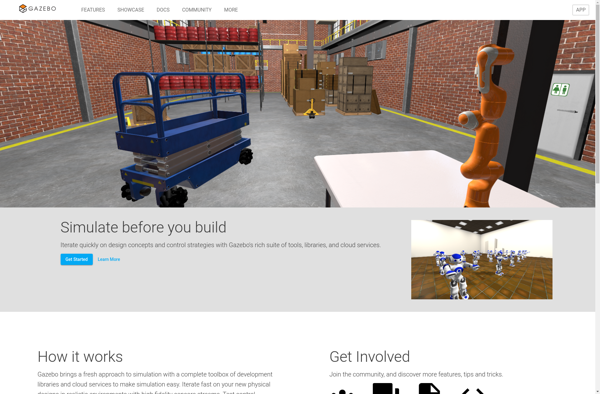
Gazebo is an open source 3D robot simulator. It accurately simulates sensors and environments for developing, testing, and training robots in complex scenarios before deployment in the real world.
What is Gazebo Robot Simulator?
Gazebo is an open source robot simulator that provides accurate simulation of sensors, robots, and environments. It is widely used in robotics research and development to prototype, benchmark systems, and train robots using realistic scenarios before they are deployed in the real world.
Key features of Gazebo include high-fidelity physics simulation using ODE, Bullet, Simbody, and DART; support for a wide range of sensors including cameras, Lidar, IMU, GPS, etc.; integration with the Robot Operating System (ROS); large collection of robot models and environments; convenient editing tools to create custom worlds; headless operation and deployment on clusters; and active development community.
Gazebo helps accelerate robot development by enabling testing of algorithms and designs in a virtual setting that behaves realistically. This reduces risk, saves time and money compared to physical prototypes. Researchers can benchmark approaches using standardized tests in Gazebo. The open source toolchain integrates smoothly in many robotics pipelines.
Gazebo Robot Simulator Features
Features
- Dynamic simulation of rigid bodies
- High fidelity physics engine
- Wide range of sensors and actuators
- Photo-realistic rendering
- Programmatic and graphical interfaces
- Integration with ROS and other robotics frameworks
Pricing
- Open Source
- Free
Pros
Cons
Official Links
Reviews & Ratings
Login to ReviewThe Best Gazebo Robot Simulator Alternatives
View all Gazebo Robot Simulator alternatives with detailed comparison →
Top Ai Tools & Services and Robotics and other similar apps like Gazebo Robot Simulator
Here are some alternatives to Gazebo Robot Simulator:
Suggest an alternative ❐Webots
V-REP
