Carla is an open-source simulator for autonomous driving research. It provides a robust and flexible virtual environment for developing and testing ADAS and autonomous driving systems using configurable vehicles, urban layouts, and traffic conditions.
Carla: Open-Source Simulator for Autonomous Driving Research
Carla is an open-source simulator for autonomous driving research. It provides a robust and flexible virtual environment for developing and testing ADAS and autonomous driving systems using configurable vehicles, urban layouts, and traffic conditions.
What is Carla?
Carla is an open source simulator focused on autonomous driving research. It is developed by Intel and the Computer Vision Center in Barcelona.
Some key features of Carla:
Flexible platform for testing ADAS and autonomous driving systems
Detailed urban environments with fully configurable vehicles, traffic, and pedestrians
Realistic sensor simulation including cameras, lidar, radar, and GPS
Weather effects like rain and fog
Python and C++ APIs for controlling the simulator
Active open source development community
Carla enables testing of perception and control algorithms by providing realistic driving scenarios without the need for real hardware. Researchers can efficiently try different approaches and conditions that are difficult and dangerous to create in the real-world. Carla is seen as an essential tool for accelerating autonomous driving research.
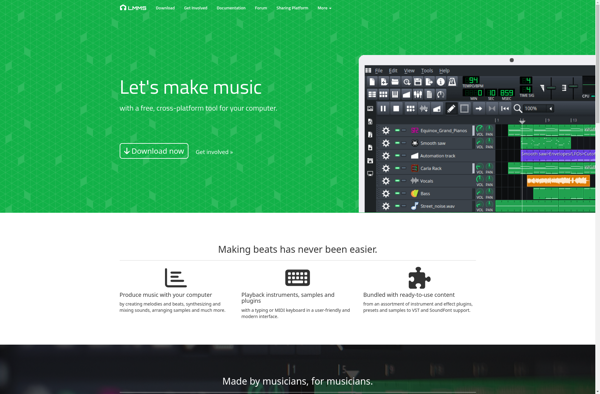
LMMS (Linux MultiMedia Studio) is a free, open source digital audio workstation (DAW) application that runs on Linux, Mac, and Windows. It allows you to produce music and other sounds using virtual instruments, audio samples, and effects plugins.Some key features of LMMS include:User-friendly graphical interface for easy music creationSupport for...
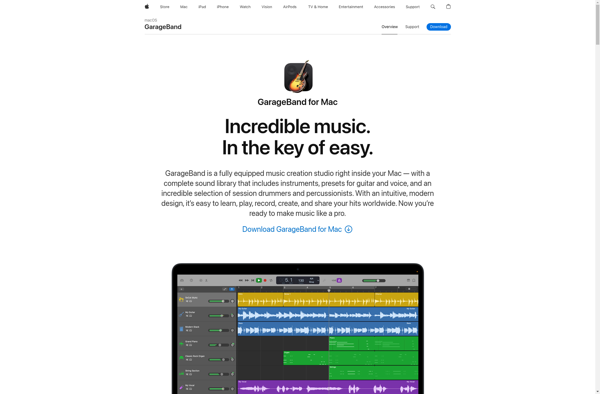
GarageBand is a digital audio workstation and music sequencer app developed by Apple. First released in 2004, GarageBand aims to be an accessible and user-friendly music production software for amateurs and novice music creators. It comes pre-installed on all new Mac computers and iOS devices.A key feature of GarageBand is...
Kontakt is a powerful sampler and virtual instrument software from Native Instruments. First released in 2002, Kontakt has become an industry standard tool for music producers, composers, and sound designers across many genres.At its core, Kontakt allows users to load audio samples of acoustic and electronic instruments, which can then...
Synchronous Audio Router (SAR) is a feature-rich Windows application designed for advanced audio routing between different apps and devices. It provides an intuitive graphical interface that allows users to connect audio streams in a flexible and customizable manner.Some key features of SAR include:Ability to route audio between different Windows apps,...
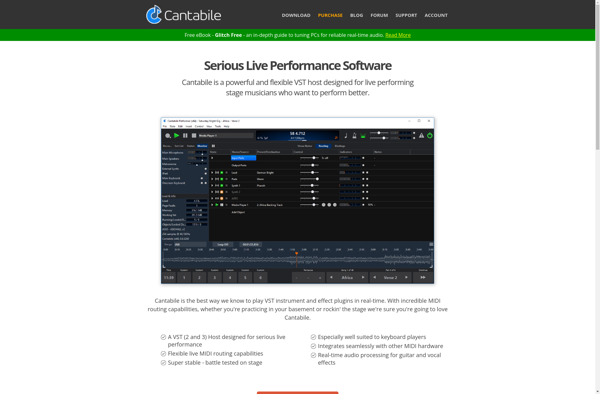
Cantabile is a versatile MIDI and audio plugin host for Windows. It allows users to route MIDI between various DAWs, virtual instruments, hardware synthesizers, and other MIDI applications. Some key features of Cantabile include:Support for VST plugins for audio effects and virtual instrumentsAdvanced MIDI routing capabilities between multiple applicationsCustomizable user...
VB-Audio Virtual Cable is a lightweight, free software application for Windows that enables you to transfer audio streams between applications in real-time. It works by installing virtual audio cables on your computer that can pass audio data between programs.Some key features of VB-Audio Virtual Cable include:Allows routing audio between music...
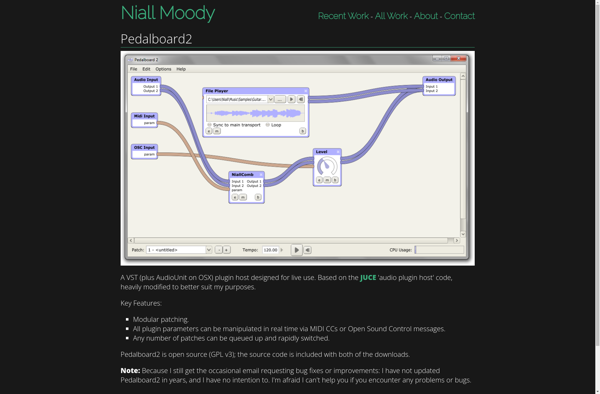
Pedalboard 2 is an open-source digital guitar effects software for Windows, macOS and Linux operating systems. It is designed specifically for guitarists to simulate guitar amps, cabinets, stompboxes and rack effects virtually using plugins called impulse responses (IRs).With Pedalboard 2, guitar players can create custom pedalboards using a drag-and-drop interface...
Vienna Ensemble Pro is a host application made by Vienne Instruments specifically for using their various virtual instruments libraries. It serves as a central hub to combine multiple Vienna Instruments libraries like their solo strings, orchestral libraries, pianos, and more into one interface for convenient access and use.Some key features...
vsound is an open-source digital audio workstation (DAW) and MIDI sequencer software for Windows, macOS and Linux operating systems. Developed by a community of musicians, programmers and enthusiasts, vsound aims to provide a free alternative to premium DAW software like Ableton Live and Logic Pro.As a DAW, vsound provides tools...
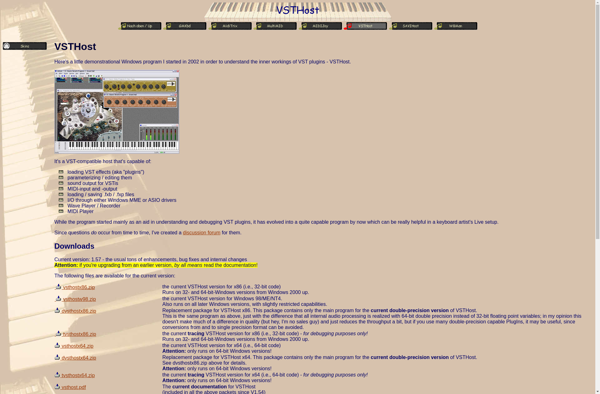
VSTHost is a free, open source host application for Virtual Studio Technology (VST) audio plugins on the Windows platform. It provides a lightweight and easy-to-use solution for using VST instruments and effects without needing a digital audio workstation.Some key features of VSTHost include:Supports loading unlimited VST effects and instrumentsLow CPU...
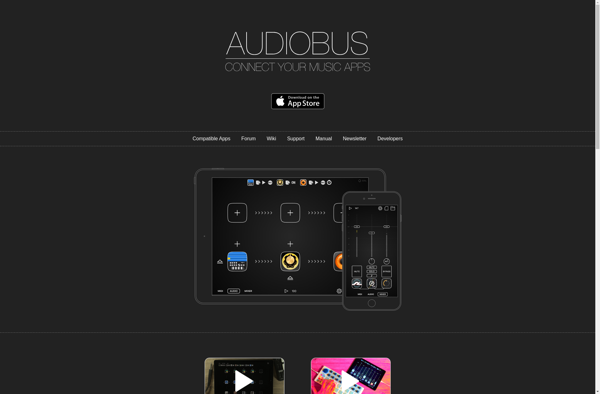
AudioBus is an audio routing application designed specifically for Apple's iOS devices including iPhone and iPad. It allows audio apps running on iOS to communicate with each other directly by acting as a virtual audio cable to route audio between them.Some key features and uses of AudioBus include:Routing audio from...
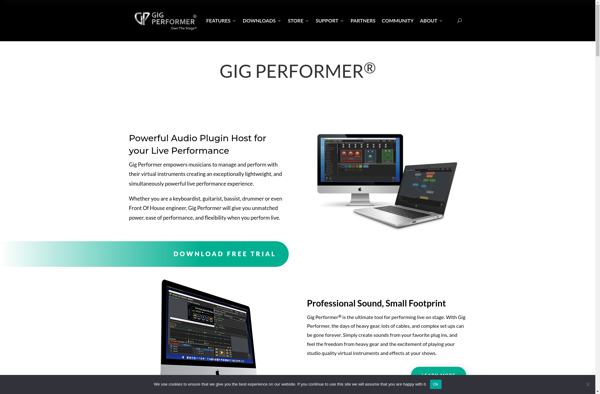
Gig Performer is a digital audio workstation software application designed specifically with the needs of live musical performers in mind. It enables musicians to play backing tracks, trigger sound effects, loop audio clips, and more during live performances.With an intuitive and flexible user interface, Gig Performer makes it simple to...
The Live Guitar and Bass Bundle by Audified is an all-in-one solution for recording electric guitars and basses in a DAW. It includes the ToneSpot Bass and ToneSpot Guitar amp/cabinet modelers and multi-effects processors to provide realistic tone without needing mics and guitar amps.ToneSpot Bass models iconic bass amplifiers like...
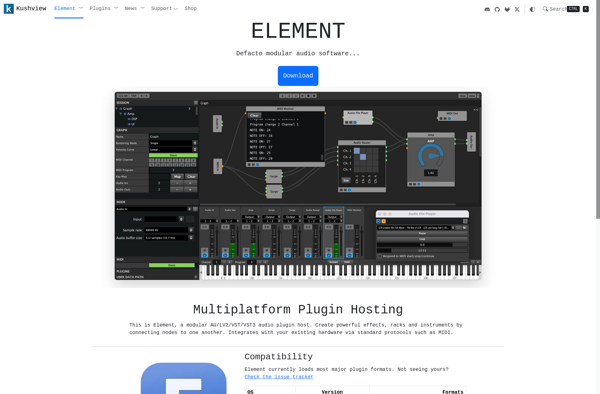
Kushview Element is a feature-rich vector graphics editor for Windows, macOS, and Linux. It is designed for creating, editing and exporting 2D vector graphics including logos, icons, illustrations, diagrams, charts and artwork. Some key features of Kushview Element include:Powerful vector drawing and editing toolsSupport for layers and groupsVersatile text tool...
SAVIHost is a web hosting company catering specifically to WordPress users and developers. Founded in 2018, SAVIHost aims to make WordPress web hosting easy and secure for everyone.Some key features of SAVIHost include:Automatic WordPress installation and updates - SAVIHost handles WordPress installation and keeps your site updated with the latest...
Audified inTone is a plug-in that functions as a frequency mixer to enhance the tone and presence of audio signals. It utilizes a mix of analog modeling, phase alignment, and harmonic resonance techniques to shape the sound in musically pleasing ways without introducing the harshness or artifacts often associated with...
Virtual audio capture grabber device is a free, open source software that creates a virtual sound card on your computer to capture audio streams that are playing from other applications. It works by installing a virtual sound device that appears to your system like a physical sound card.This virtual device...
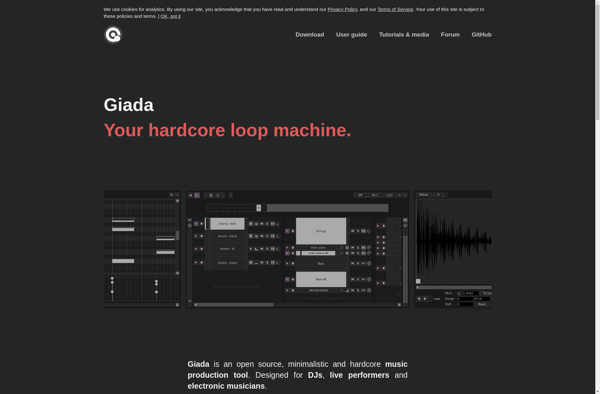
Giada is an open-source digital audio workstation developed specifically for live musical looping performances. Released under the GNU General Public License, Giada is available free of charge for Windows, macOS, and Linux.The software is designed to make it easy for musicians, particularly solo artists, to create and manipulate audio loops...
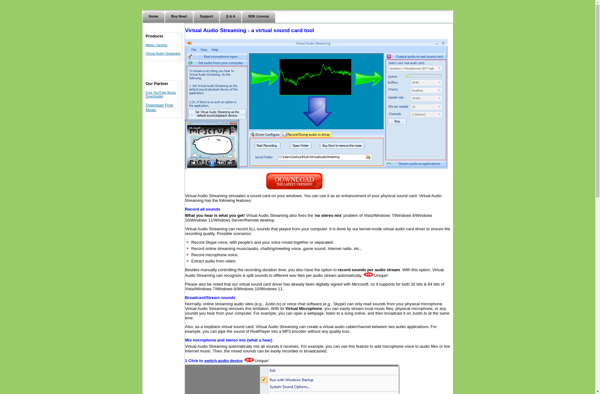
Virtual Audio Streaming software enables you to stream audio from one device to another in real-time over an IP network. It works by capturing the audio output on one device, encoding it into a digital stream, and sending that data over the network to another device where it is decoded...
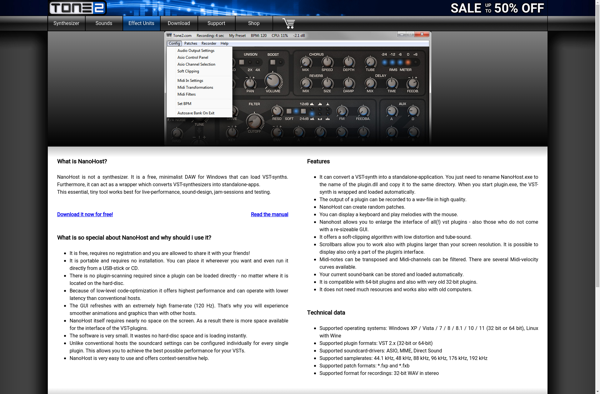
NanoHost is a web hosting company catering to small business owners, bloggers, students, and personal website owners. Founded in 2019, NanoHost aims to provide affordable and reliable shared hosting services to individuals and small organizations with basic website hosting needs.NanoHost's shared hosting plans come with unlimited monthly data transfers, free...
Bidule is an open-source and cross-platform digital audio workstation software and multimedia creation tool. Originally released in 2003, Bidule has developed an active user and developer community over the years.Some key features of Bidule include:Flexible modular routing system that allows complex audio and MIDI routing configurationsSupport for VST plugins, both...
Luppp is an open-source digital audio workstation (DAW) software designed for music production and audio editing. It provides a complete set of tools for recording, editing, mixing and mastering audio and MIDI.Some of the key features of Luppp include:Unlimited audio and MIDI tracksSupport for VST pluginsAdvanced mixing capabilities with effects...
NUGEN Audio SigMod is a versatile audio plugin used to manipulate and modulate audio signals with creative effects. It works within major DAWs like Pro Tools, Logic Pro, Ableton Live, and more.Some key features of SigMod include:Frequency and amplitude modulation effectsCustom modulation shapes and timingSidechain modulation inputComprehensive filter modulePattern sequencer...
New Sonic Arts Freestyle is a digital audio workstation (DAW) designed specifically for fast and intuitive loop-based music production. At its core is an elegant loop browser that makes finding, auditioning and importing loops extremely quick. Freestyle comes packed with thousands of pro-quality loops, one-shot samples and multi-sampled instruments covering...
Rack Performer is a modular virtual instrument plugin developed by Sample Logic. It provides a flexible and customizable environment for creating your own virtual synths, samplers, and effects units.The core of Rack Performer is its rack-style modular interface. This allows you to add and connect over 200 different modules together,...
LinuxSampler is an open source software sampler application for Linux. It enables high quality audio sampling functionality on the Linux platform. Some key features of LinuxSampler include:Supports loading and playback of common sample formats like SoundFonts and GigaSamplesLow latency for realtime sampling applicationsDisk streaming of large sample libraries with low...
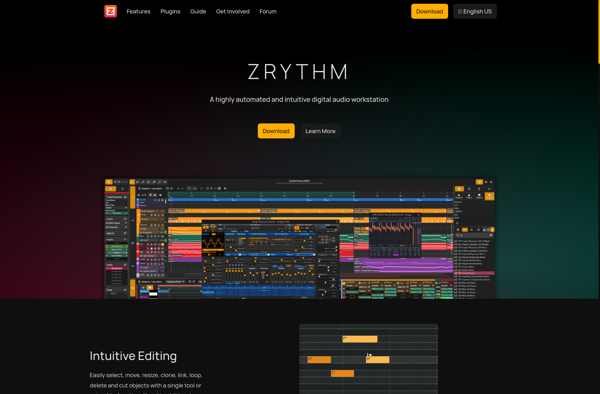
Zrythm is an open-source, cross-platform digital audio workstation (DAW) designed for music production. It is developed by a dedicated community of contributors and aims to provide a fully-featured DAW that is free to use.Some key features of Zrythm include:Unlimited audio and MIDI tracksSupport for VST, LV2, LADSPA, DSSI, and other...
VSTStuff is a lightweight and easy-to-use free VST host that enables you to load and use VST (Virtual Studio Technology) plugins for digital audio workstation and effects purposes. It provides a straightforward graphical interface for adding, managing, and routing VST plugins.Some key features of VSTStuff include:Supports most VST2 and VST3...